Overview
This page explain the overview of the RoboMaster ROS 2 packages:
Explanation of packages
Source code is divided into several packages, each with its own purpose:
robomaster_interface: This package provides the interface for controlling the RoboMaster robots and drones.
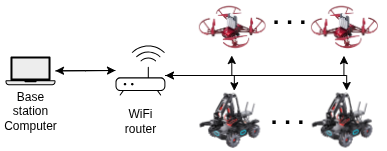
robomaster_ros2: This package contains the main implementation of the RoboMaster ROS 2 node.
robomaster_examples: This package includes example scripts using the RoboMaster ROS 2 node.
robomaster_gz: This package provides integration with Gazebo for simulating the RoboMaster drones.
Interfaces
The robomaster_interface package provides the interface for controlling the RoboMaster robots and drones. It includes the necessary messages, services, and actions for communication between the ROS 2 nodes and the RoboMaster devices.
Name |
Type |
Description |
|---|---|---|
GimbalAngle |
Message |
Message description for the gimbal angle of the robot. |
GimbalVel |
Message |
Message description for the gimbal velocity of the robot. |
TelloMpad |
Message |
Message description for the Tello mission pad recognition. |
AddDrone |
Service |
Service to add a drone to the system. |
AddRobot |
Service |
Service to add a robot to the system. |
RemoveRobot |
Service |
Service to remove a drone/robot from the system. |
Takeoff |
Service |
Service to command the drone to take off. |
SetSpeed |
Service |
Service to set the speed of the drone. |
TelloLED |
Service |
Service to control the LED of the Tello external module. |
TelloMled |
Service |
Service to control the 8x8 matrix LED of the Tello external module |
MoveChassis |
Service |
Service to move the chassis of the robot. |
MoveArm |
Service |
Service to move the arm of the robot. |
MoveGimbal |
Service |
Service to move the gimbal of the robot. |
Gripper |
Service |
Service to open or close the gripper of the robot. |
RobotLED |
Service |
Service to control the LED modules of the robot. |
Fire |
Service |
Service to fire IR/gel-beans using the robots gimbal. |
RoboMaster ROS 2
The robomaster_ros2 package is the main implementation of the RoboMaster server as well as several helper nodes. It provides the core functionality for controlling the RoboMaster robots and drones, including communication with the devices, handling of messages, and execution of commands.
robomaster server
This is the main node, handles the server type framework for the RoboMaster robots and drones. It is used to configure/add/remove drones and robots as well as handles several common services.
Topics and services provided by the server and the added robo/drone:
List of services:
Name |
Type |
|---|---|
/add_drone |
AddDrone |
/add_robot |
AddRobot |
/remove_robot |
RemoveRobot |
/takeoff_all |
Trigger |
/land_all |
Trigger |
/drone_1/get_ns |
Trigger |
/drone_1/get_battery |
Trigger |
/drone_1/set_speed |
SetSpeed |
/drone_1/takeoff |
Takeoff |
/drone_1/land |
Trigger |
/drone_1/hover |
Empty |
/drone_1/soft_emergency |
Trigger |
/drone_1/emergency |
Empty |
/drone_1/set_led |
TelloLED |
/drone_1/set_mled |
TelloMled |
/drone_1/status |
Trigger |
/drone_1/reboot |
Empty |
/robot_1/get_ns |
Trigger |
/robot_1/led_chassis |
RobotLED |
/robot_1/move_gimbal |
MoveGimbal |
/robot_1/fire |
Fire |
/robot_1/move_arm |
MoveArm |
/robot_1/gripper |
Gripper |
List of topics (published/subscribed):
Name |
Type |
|---|---|
/drone_1/rmtt_server/pose |
Pose |
/drone_1/front_tof |
Range |
/drone_1/bottom_tof |
Range |
/drone_1/imu |
Imu |
/drone_1/attitude |
QuaternionStamped |
/drone_1/baro |
FluidPressure |
/drone_1/mpad |
TelloMpad |
/drone_1/image |
Image |
/drone_1/cmd_vel |
Twist |
/drone_1/external_position |
PoseStamped |
/robot_1/arm_position |
PointStamped |
/robot_1/gimbal_cmd_vel |
GimbalVel |
/robot_1/cmd_vel |
Twist |