Tutorials
Command line
Drones
Takeoff all the connected drones
ros2 service call /takeoff_all std_srvs/srv/Trigger "{}"
Land all the connected drones
ros2 service call /land_all std_srvs/srv/Trigger "{}"
Takeoff individual drones
ros2 service call /drone_1/takeoff robomaster_interface/srv/Takeoff "{height: 0.0}"
Land individual drones
ros2 service call /drone_1/land std_srvs/srv/Trigger "{}"
Soft emergency landing
ros2 service call /drone_1/soft_emergency std_srvs/srv/Trigger "{}"
Emergency shutdown
ros2 service call /drone_1/emergency std_srvs/srv/Empty "{}"
Reboot drone
ros2 service call /drone_1/reboot std_srvs/srv/Empty "{}"
Add drone to the server
ros2 service call /add_drone robomaster_interface/srv/AddDrone "
name: <drone_name_str>
ip: <drone_ip_str>
"
Remove drone from the server
ros2 service call /remove_drone robomaster_interface/srv/RemoveRobot "
name: <drone_name_str>
type: 'rmtt'
"
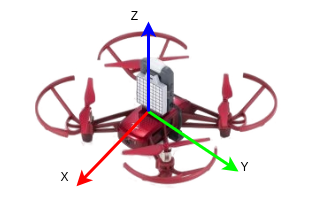
Axis of the drone is Z-up, Y-left, X-forward, as shown in the image below.
Control drones with external positioning system
Drones have velocity command that can be used to control the drone. However, to use this command, the controller needs to know drone’s current position. This can be achieved by using an external positioning system such as Vicon or OptiTrack. The following example shows how to use the external positioning system to control the drone’s position with simple PID control.
More complex examples are included in the robomaster_examples package.
from std_srvs.srv import Trigger
import rclpy
from rclpy.node import Node
import numpy as np
import os
from tf2_ros.transform_listener import TransformListener, Buffer
from geometry_msgs.msg import Twist
KP = [0.6,0.6,0.75] #[0.6,0.6,0.75]
KI = [0.0,0.0,0.0]#[0.0001,0.0001,0.00001]
KD = [0.0,0.0,0.0]#[0.0001,0.0001,0.000001]
class Waypoints(Node):
# First takeoff the drone before running the script
def __init__(self):
super().__init__('waypoints')
self.world_frame = "world"
self.tf_frame = "rmtt_1"
self.frequency = 20
self.robot_name = "rmtt_1"
self.waypoints = np.array([[0,0,1],[1,0,1],[1,1,1],[0,1,1],[0,0,1],[0,0,0.5]])
self.tfBuffer = Buffer()
self.tfListener = TransformListener(self.tfBuffer, self)
self.pubCmdVel = self.create_publisher(Twist, f'/{self.robot_name}/cmd_vel', 10)
self.land_client = self.create_client(Trigger, f'/{self.robot_name}/land')
while not (self.land_client.wait_for_service(timeout_sec=1.0)):
self.get_logger().info('land service not available, waiting again...')
self.Iterm = np.zeros(3)
self.e_prev = np.zeros(3)
self.land_req = Trigger.Request()
self._timer = self.create_timer(1.0/self.frequency, self.control_loop)
def get_transform(self, source_frame, target_frame):
return self.tfBuffer.lookup_transform(source_frame, target_frame, rclpy.time.Time())
def send_land_request(self):
self.land_client.call_async(self.land_req)
self.get_logger().info('Land request sent!')
def control_loop(self):
dt = self._timer.time_since_last_call() / 1e9
if dt == 0: return # Avoid division by zero on the first call
try:
transform = self.get_transform(self.world_frame, self.tf_frame)
except Exception as e:
self.get_logger().warn(f'Could not get transform: {e}')
return
current_pos = np.array([
transform.transform.translation.x,
transform.transform.translation.y,
transform.transform.translation.z
])
target_pos = self.waypoints[0]
error_pos = target_pos - current_pos
# --- PID Calculation for each axis ---
# Proportional
p_term = KP * error_pos
# Integral
self.Iterm += error_pos * dt
i_term = KI * self.Iterm
# Derivative
d_term = KD * (error_pos - self.e_prev) / dt
# Update previous error
self.e_prev = error_pos
# --- Calculate velocity command ---
pid_result = p_term + i_term + d_term
cmd = Twist()
# Clamp the output velocity to a safe range
cmd.linear.x = np.clip(pid_result[0], -0.8, 0.8)
cmd.linear.y = np.clip(pid_result[1], -0.8, 0.8)
cmd.linear.z = np.clip(pid_result[2], -0.8, 0.8)
self.pubCmdVel.publish(cmd)
# --- Waypoint switching logic ---
dist_to_target = np.linalg.norm(error_pos)
if dist_to_target < 0.2:
self.get_logger().info(f'Reached waypoint {target_pos}, distance: {dist_to_target:.2f}m')
self.waypoints = np.delete(self.waypoints, 0, 0)
# Reset PID state to prevent integral windup from affecting the next waypoint
self.Iterm = np.zeros(3)
self.e_prev = np.zeros(3)
if len(self.waypoints) == 0:
self.get_logger().info('All waypoints reached. Landing...')
self.send_land_request()
self._timer.destroy()
def main(args=None):
rclpy.init(args=args)
waypoints = Waypoints()
try:
rclpy.spin(waypoints)
except KeyboardInterrupt:
waypoints.send_land_request()
pass
waypoints.destroy_node()
rclpy.shutdown()